Image
-
이미지는 숫자로 구성된 3D Array로 구성됨

- 숫자 = 0~255
- 3D Array = [Hight] × [Width] × [Color channel]
Challenges
- 보는 시각에 따라 이미지는 다르게 보일 수 있음
- 조명의 밝기/색상에 따라 다르게 보일 수 있음
- 인식하려고하는 대상이 항상 정면을 서있는게 아님. 비틀어져있고 회전해있고 누워있고
- 인식대상이 은폐엄폐/가려짐 등으로 일부만 인식 가능
- 배경혼란, 인식대상물과 배경의 패턴이 비슷
- 동종 내 다양성, 같은 고양이라도 페르시아고양이, 길고양이 다 다르게생김
Challenges 접근 방법
- 이미지의 특징 파악
- 특징적인 엣지나 모형을 찾아서 Library화 시킴 그리고 배열 상태 비교 후 Classification 함
- 성능이 낮음
-
데이터 기반 접근
-
이미지와 레이블로 구성된 데이터셋을 수집
-
데이터셋에 대해서 이미지 Classifier를 학습시킴
def train(train_images, train_labels): ... return model -
Test 이미지셋들에 대해서 학습시킨 이미지 Classifier를 평가
def predict(model, test_images): ... return test_labels
-
Nearest Neighbor Classifier
- Training 단계 :
- 모든 학습 데이터들을 메모리 상에 올려서 기억하게 됨
- 예측 단계 :
- Test 이미지 한장을 L1 Distance를 사용하여 모든 학습 데이터들과 비교
- L1 Distance 값이 가장 작은 학습 데이터를 찾아 Test 이미지의 레이블을 예측할 수 있음
- 단점 :
- 학습데이터 양에 따라 Classification 작업 (예측 단계) 시간이 선형적으로 증가하게됨
- 속도를 빨리할 수 있는 Nearest Neighbor Classifier들 : ANN, FLANN
K-Nearest Neighbor Classifier
-
K개의 근접한 학습데이터를 찾는 방식
- 보통 1-Nearest Neighbor보다 성능이 좀 더 좋음
- 근데 현실에서는 사용해서는 안됨
Linear Classification (Score function)
-
이미지 내의 모든 Pixel값 들에 대해서 Weight를 곱하여서 처리 한 것의 “합”이다
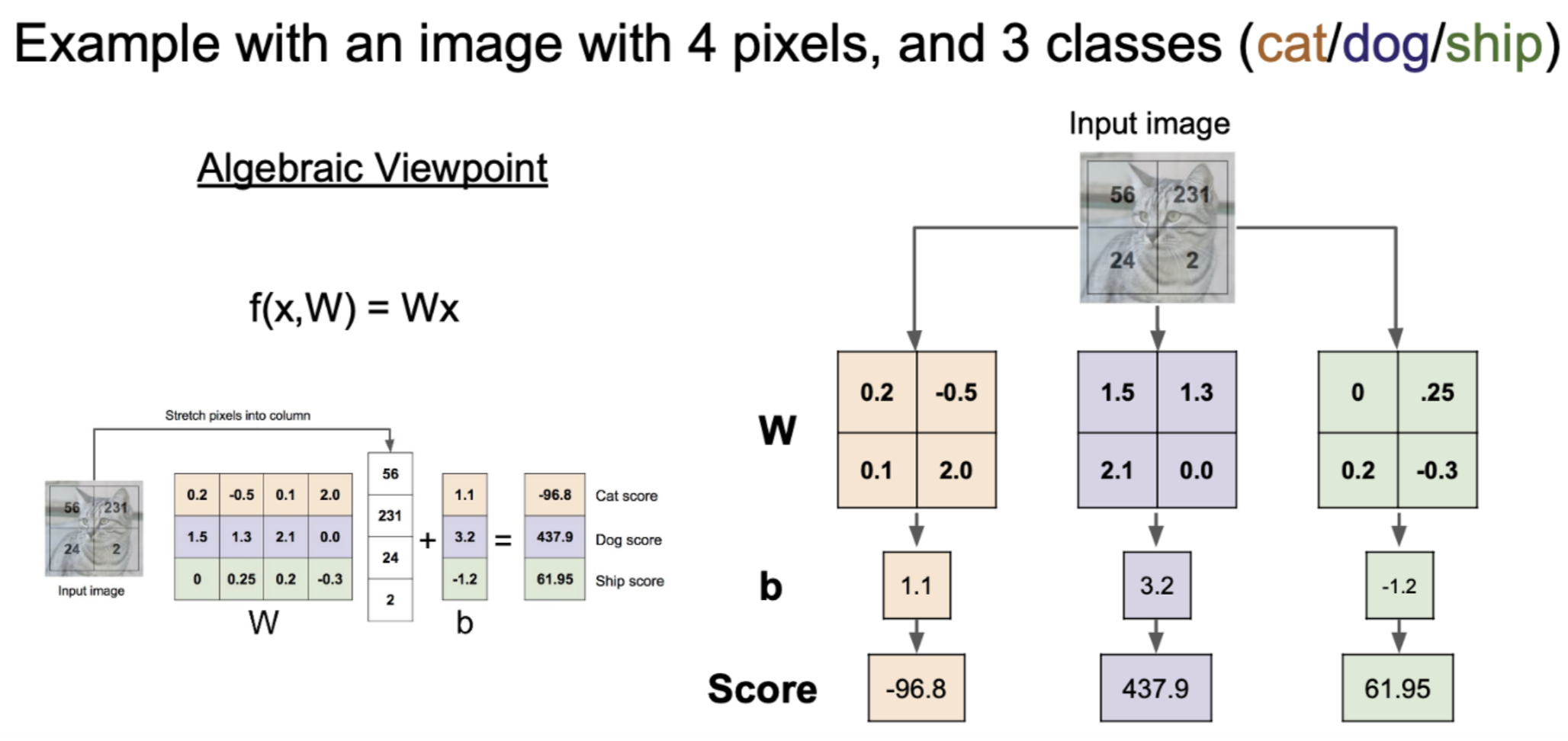
- Linear Classification를 통해 입력 이미지의 각 class에 대한 score를 낼 수 있음
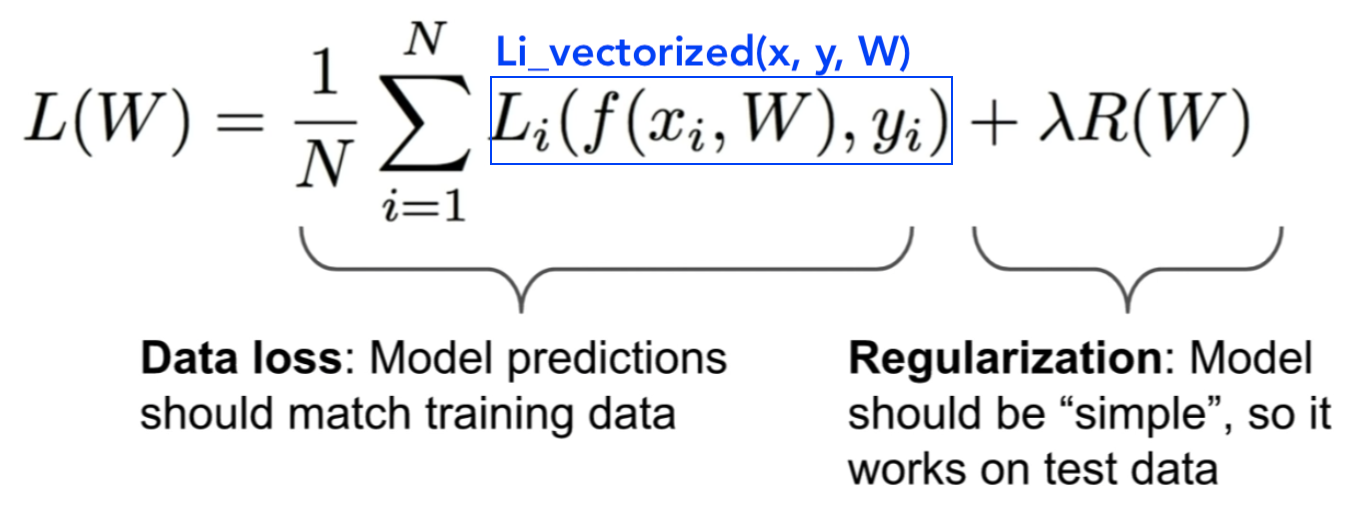
Loss Function
-
Linear Classification를 통해 나온 score들이 어느 정도 좋거나 또는 나쁘냐의 정도를 정량화 하는 것
-
Example 1) SVM Hinge loss
""" SVM 의 Hinge Loss를 사용하여 Loss 값 구하기 x : Input image y : Input image label W : Score function's Weight """ def Li_vectorized(x, y, W): scores = W.dot(x) margins = np.maximum(0, scores-scores[y]+1) margins[y] = 0 loss_i = np.sum(margins) # np.mean을 써도 큰 의미는 없음, 단지 scale만 작아짐 return loss_i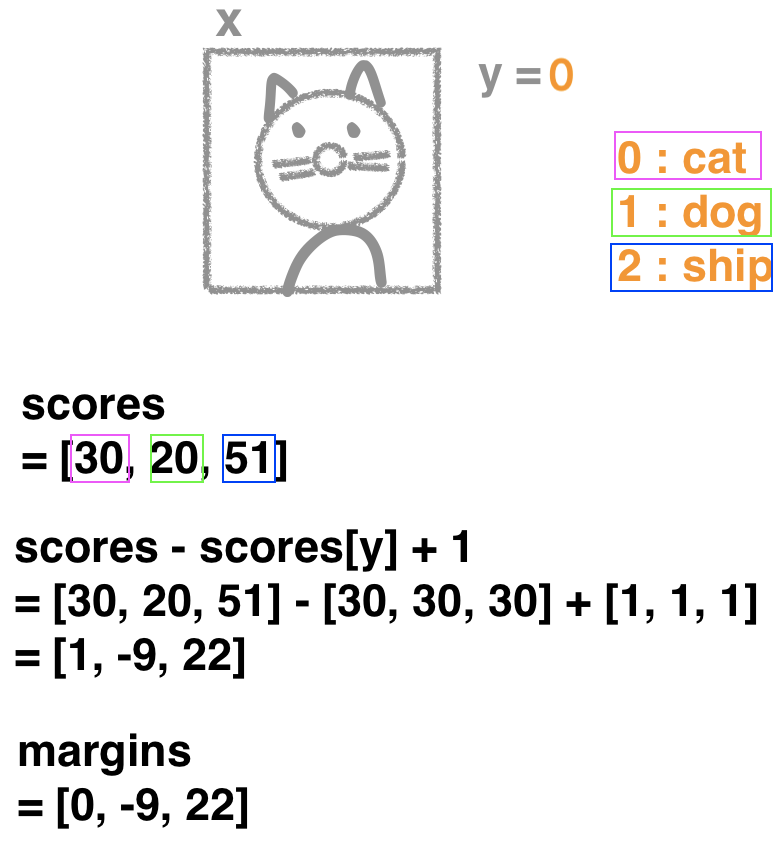
-
Li_vectorized(x, y, W)return값 최소/최대 = 0 / ∞ (则, Loss值为’0’ 表示最好) -
특성 : 미세한 데이터 변경에 둔한 편, 단지 정답 class가 다른 class보다 높냐에 초점을 둠
-
-
Example 2) Softmax Cross entropy loss
-
Softmax function : Score function을 통해 나온 score vector의 각 element값들 0~1사이로 변경
- 변경된 element값들의 총 합은 1
import numpy as np # Score function을 통해 나온 score vector f = np.array([3.2, 5.1, -1.7]) # Numeric problem를 방지하기 위해 f = f - np.max(f) # Softmax function p = np.exp(f) / np.sum(np.exp(f)) ''' f == [-1.9 0. -6.8] p == [0.12998254 0.86904954 0.00096793] ''' -
Cross entropy loss
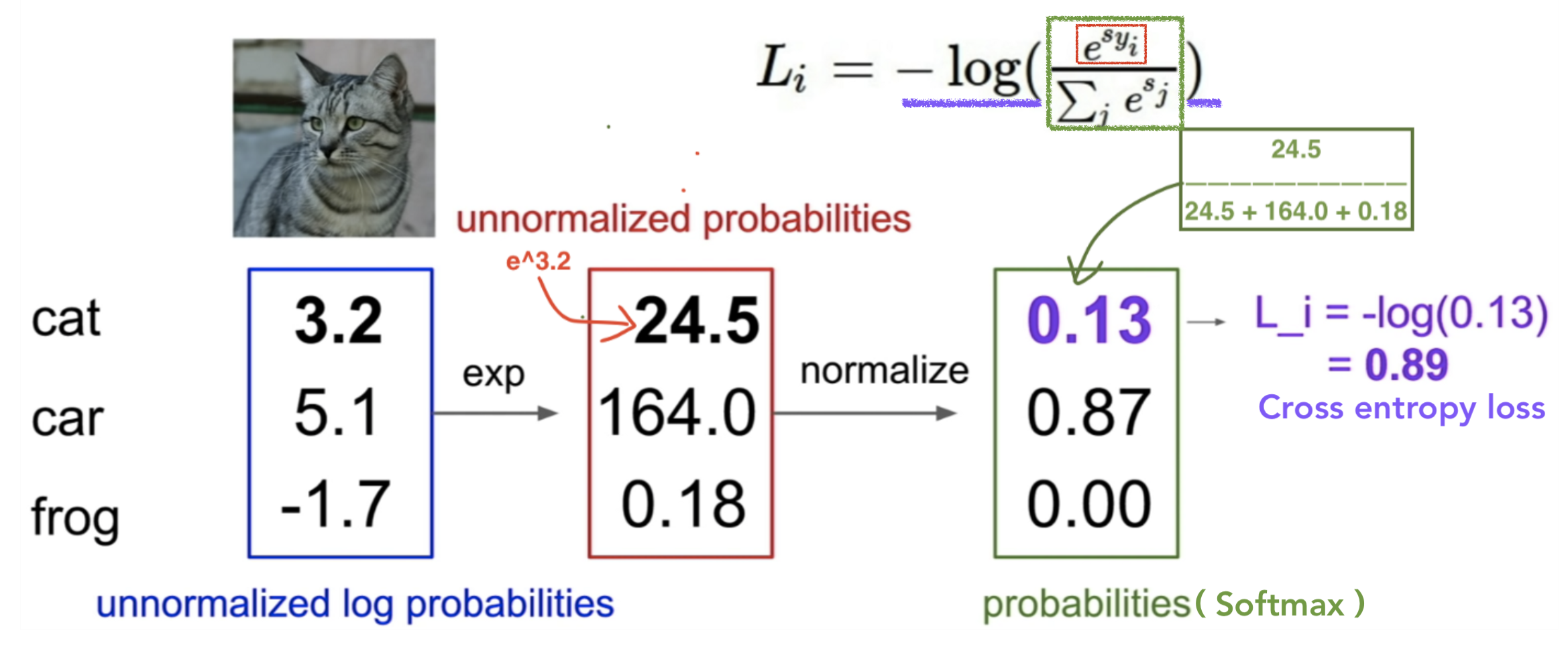
CrossEntropyLoss = -np.log10(p) ''' CrossEntropyLoss == [0.88611498 0.06095547 3.01415795] '''-
CrossEntropyLoss의 최소/최대값 : 1 / ∞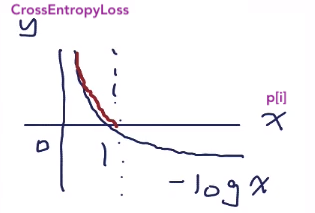
(즉, score를 잘 맞추면 loss는 0에 가까움 , 잘 못 맞추었다면 loss는 ∞에 가까움)
-
특성 : SVM에 비해 미세한 데이터 변경에 확실히 예민하고 loss값에 변동이 있음
-
-
Weight Regularization
-
0이라는 loss값을 만드는 weight가 유일하지 않음
-
유일한 weight값을 결정해주기 위해서 Regularization를 도입
-
Data Loss : 학습용 데이터들에 최대한 최적화를 하려고 노력함
- Classifier 다항식 차수가 깊어지게됨
-
Regularization : 테스트 데이터들에 최대한 일반화를 하려고 노력함
- Classifier 다항식 차수가 깊어지지 않도록 방지함
- λ : Regularization 적용 가중치
-
Data Loss 과 Regularization가 서로 싸우며 결국 가장 최적화된 weight값을 추출하게 됨
-
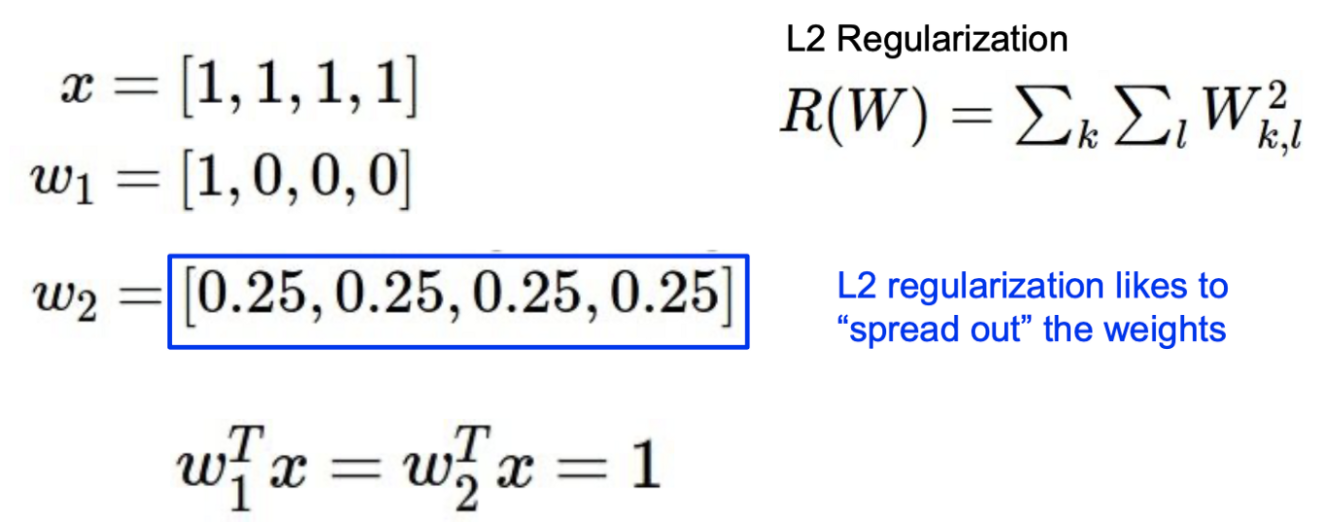
Ex) L2 Regularization
-
L2 Regularization 경우, 한쪽으로 쏠리기 보다는 서로 비슷하게 spread out된 Weight 벡터를 선호
 Classifier 다항식의 전체 차수를 0에 가깝도록 유도
Classifier 다항식의 전체 차수를 0에 가깝도록 유도 -
L1 Regularization 경우, 한쪽으로 쏠려 있고 나머지는 0이 되는 sparse한 Weight 벡터를 선호
Classifier 다항식의 특정 원하는 차수를 0이 되도록 만듬
-
-
Optimization
-
Loss를 minimize하는 weight를 찾아가는 과정
-
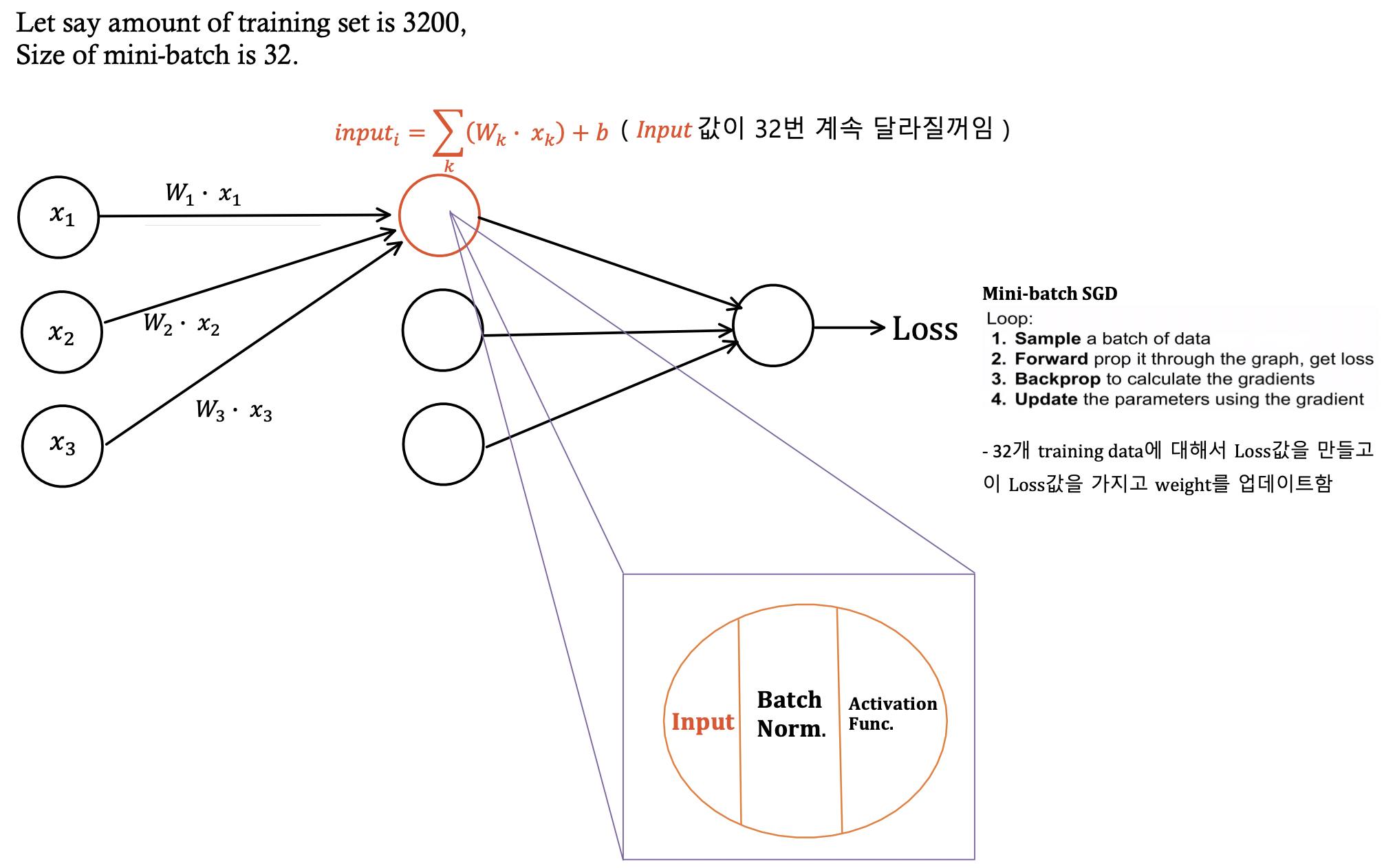
Gradient descent : 경사를 따라서 조금씩 내려가는 방식으로 weight를 업데이트함
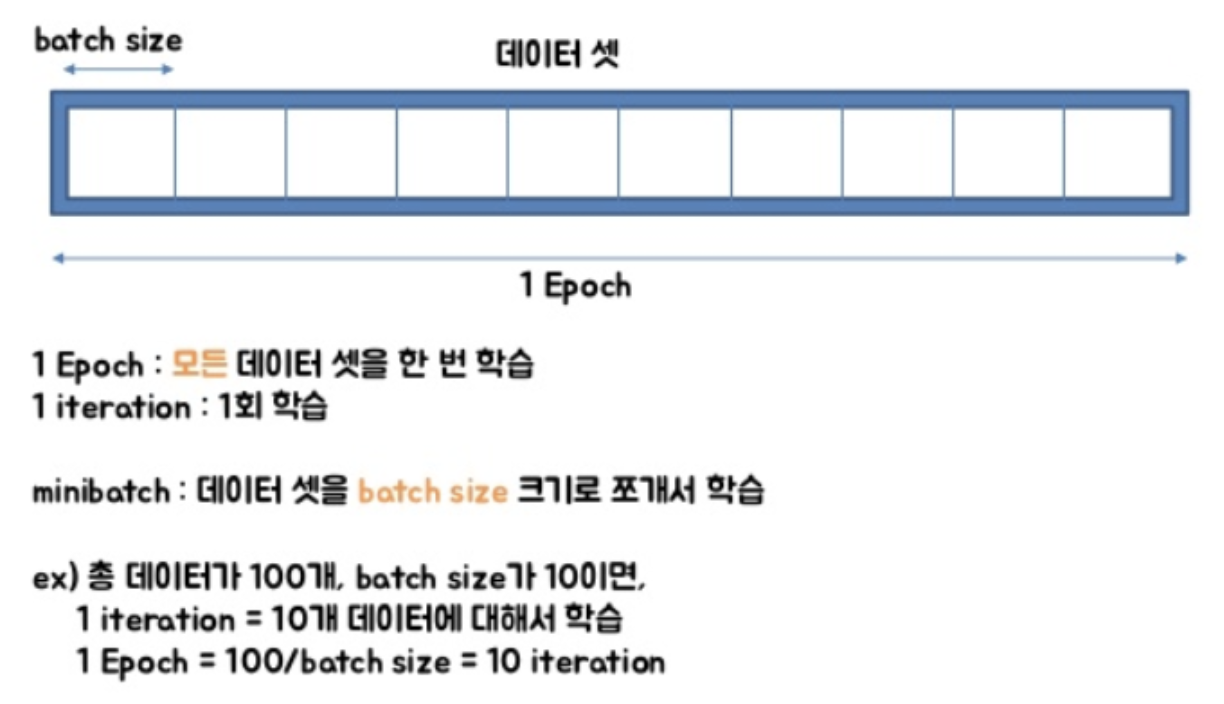
# Full-batch gradient descent : 훈련데이터 전체를 활용 while True : weight_gradient = evaluate_gradient(loss_func, data, weight) weight = weight - learning_rate * weight_gradient # weight 업데이트# Mini-batch gradient descent : 훈련데이터의 일부만을 활용 (성능을 높임) while True: data_batch = sample_training_data(data, 256) # sample 256 examples weight_gradient = evaluate_gradient(loss_fun, data_batch, weights) weight = weight - learning_rate * weight_gradient # weight 업데이트-
Mini-batch size : CPU/GPU 환경에 따라 설정함
-
Weight를 업데이트하는 또 다른 방법들 :
-
momentum : loss 가 줄어드는 속도까지 고려, 더 빠른 효과가 있음
-
Adagrad
-
RMSProp
-
Adam
…
-
-
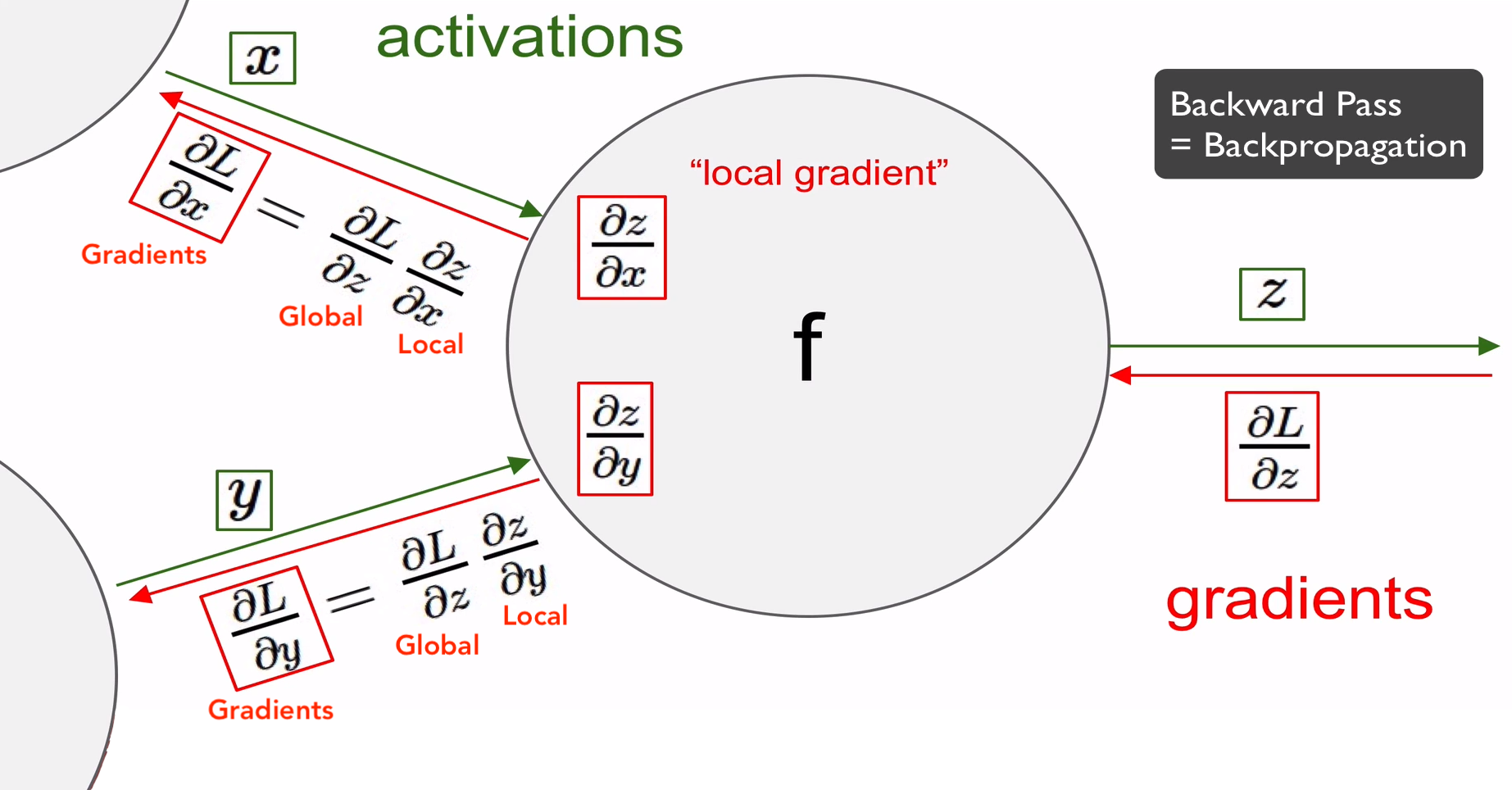
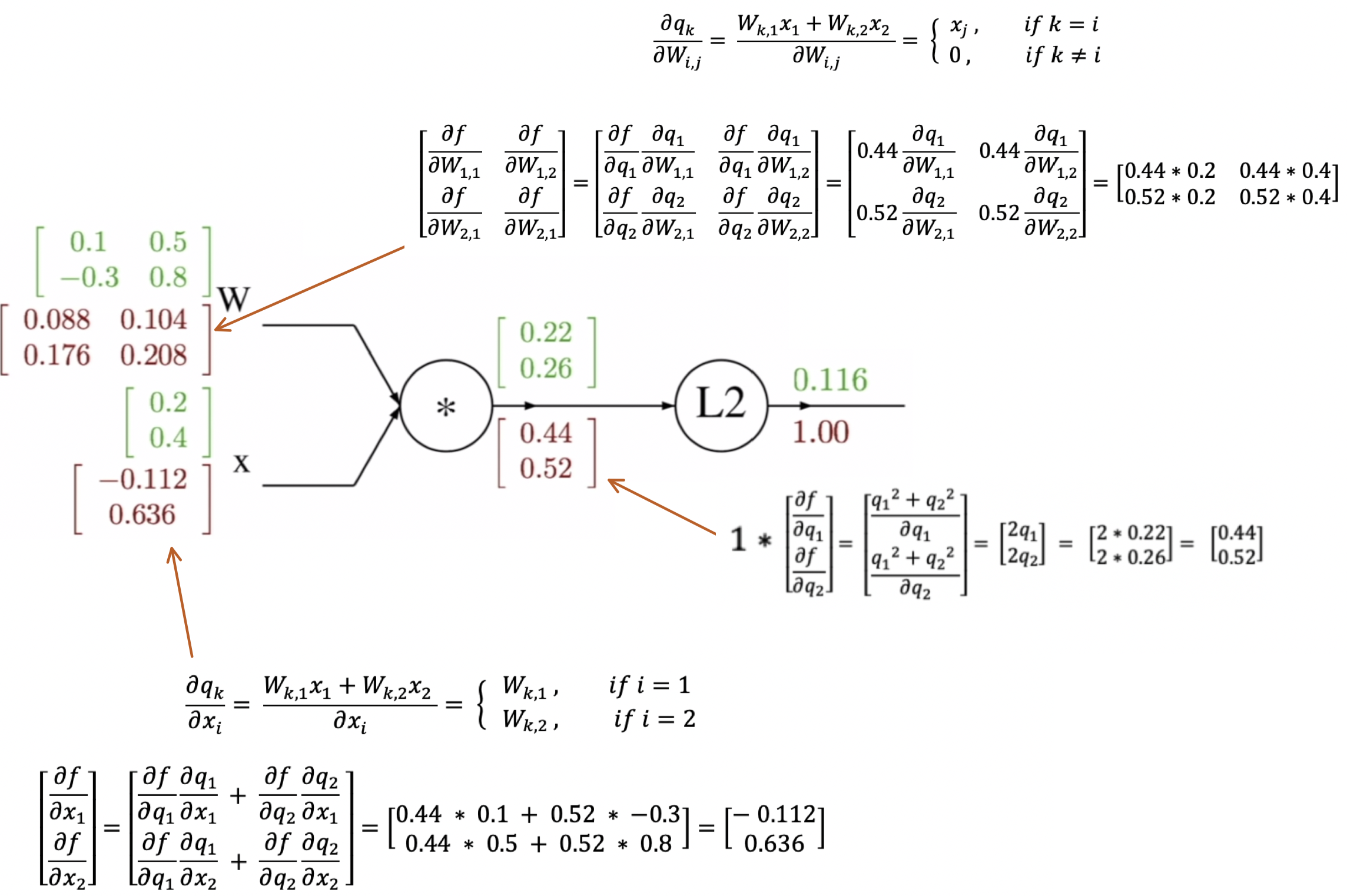
Backpropagation
- Computational graph를 이용해서 함수를 표현하게 되면, 모든 변수에 대해서 재귀적으로 gradient를 계산하는 backpropagation을 사용할 수 있게 됨
-
Local Gradiant : Forward pass 할 때 구해서 메모리에 저장해 둔다
-
Global Gradiant : Backward pass 할 때 구함
-
Gradiant = Local Gradiant × Global Gradiant
-
Example
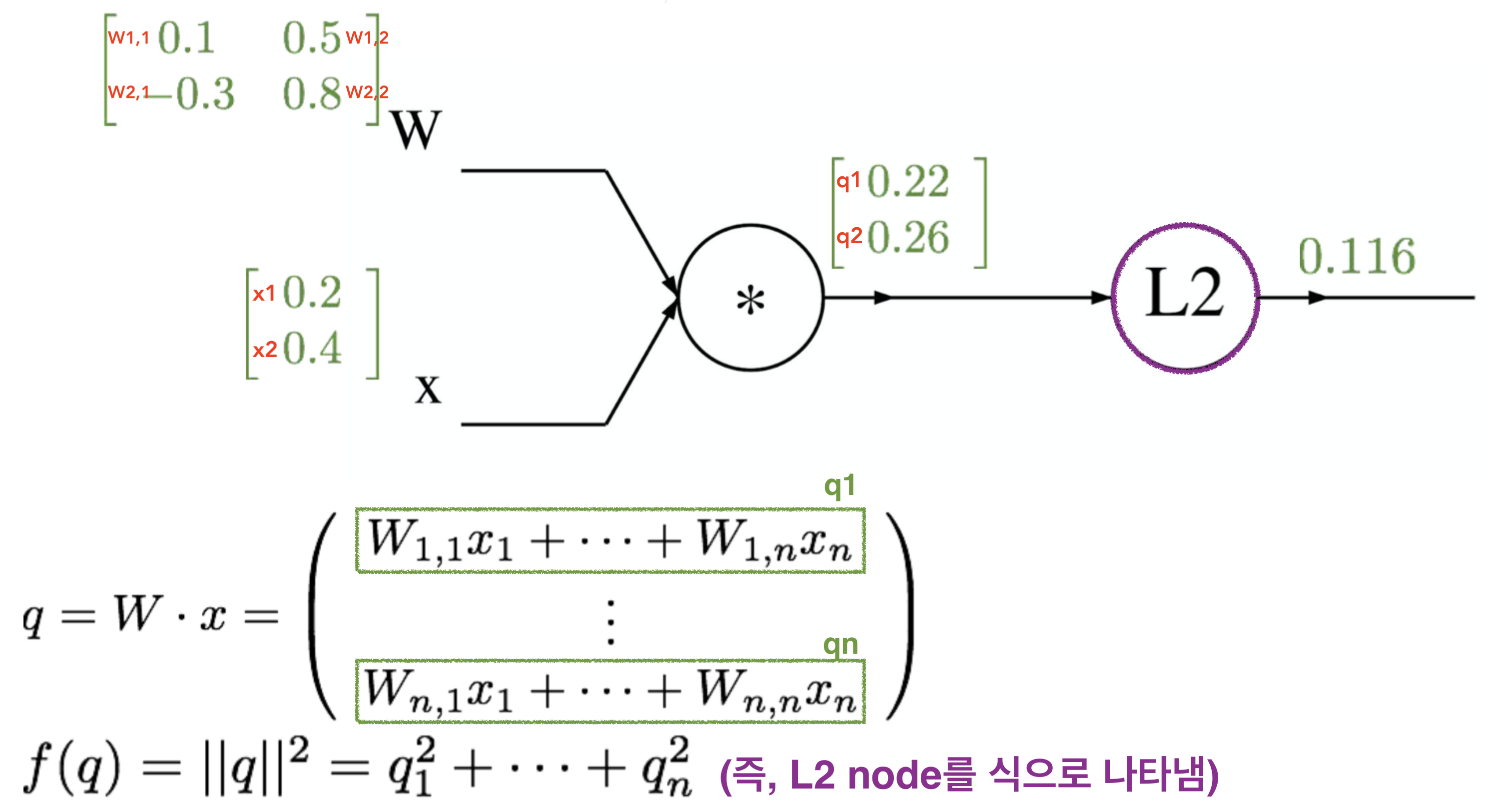
- Backward pass 하면서 gradient 계산
Neural Network
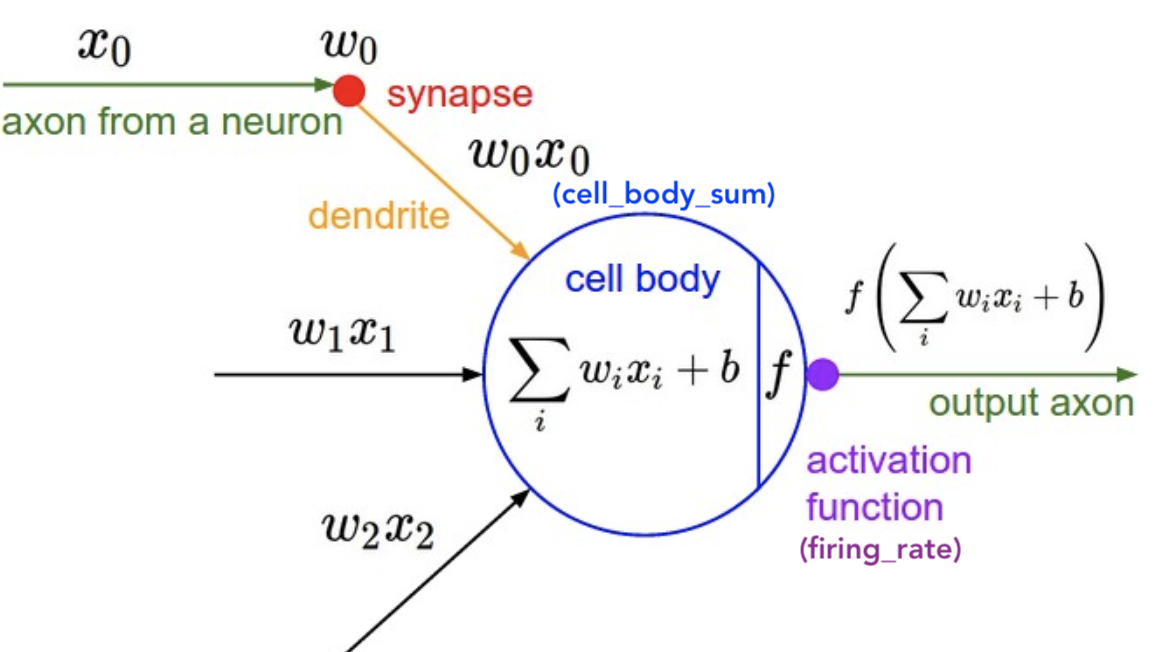
Neuron
class Neuron(object):
# ...
def forward(self, inputs):
""" assume inputs and weights are 1-D numpy arrays and bias is a number """
cell_body_sum = np.sum(inputs * self.weights) + self.bias
firing_rate = 1.0 / (1.0 + math.exp(-cell_body_sum)) # sigmoid activation function
return firing_rate
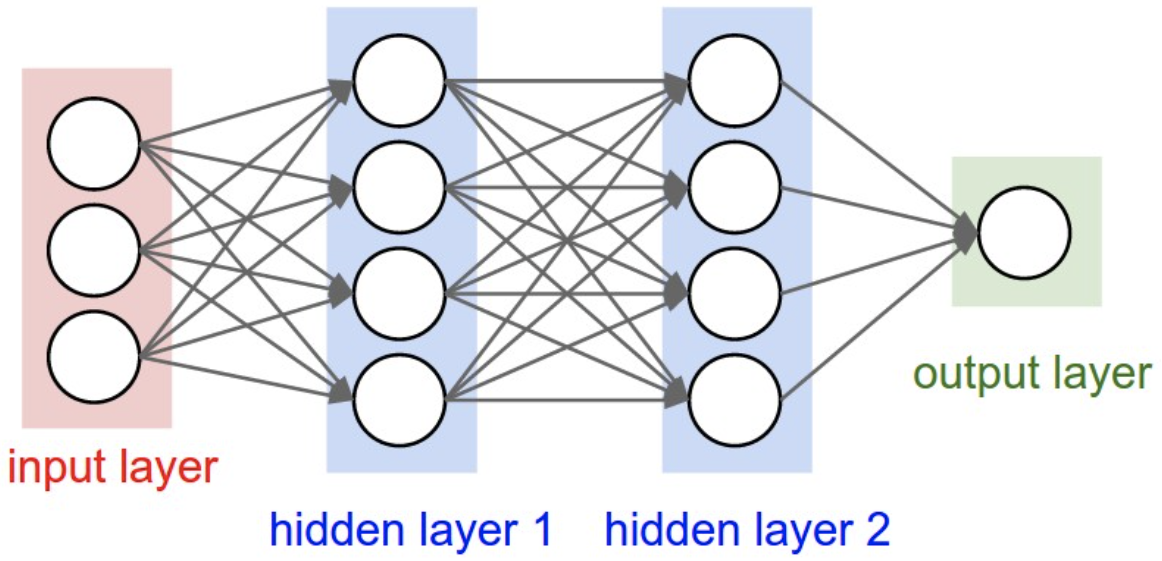
Architectures
-
Fully Connected Layers : 모든 node (or Neuron)들이 연결 되어있다
-
Example : 3-Layer Neural Network (or 2-Hidden-Layer Neural Network)
# forward-pass of a 3-layer neural network: f = lambda x: 1.0/(1.0 + np.exp(-x)) # activation function (use sigmoid) x = np.random.randn(3, 1) # random input vector of three numbers (3x1) h1 = f(np.dot(W1, x) + b1) # calculate first hidden layer activations (4x1) h2 = f(np.dot(W2, h1) + b2) # calculate second hidden layer activations (4x1) out = np.dot(W3, h2) + b3 # output neuron (1x1) -
데이터의 Overfitting이 일어나지 않도록, Neural Network를 구성하는 방법은 Network를 작게 만드는게 아니라 Regularization Strength(λ)를 더 높혀줘야된다
-
그래서 Neural Network는 Regularization 를 잘 한다는 전제 하에 network가 더 크면 클 수록 좋다
Activation Function
-
활성화(Activate)라는 이름에서 알 수 있듯이 활성화 함수란 입력 신호의 총합
cell_body_sum이 활성화를 일으키는지 정하는 역할을 한다 -
Activation Function를 왜 반드시 이용해야되나?
-
Activation Function를 사용하지 않으면 Neural Network 전체가 몇개의 Layer를 가지든 간에 단일의 linear classifier 수준이 되버림
-
Example : y=ax를 Activation Function으로 사용하게 된다면
- 2계층 layer일 경우 y=a(ax), 3계층 layer일 경우 y=a(a(ax)) … n계층 layer일 경우 y=(a^n)x
-
-
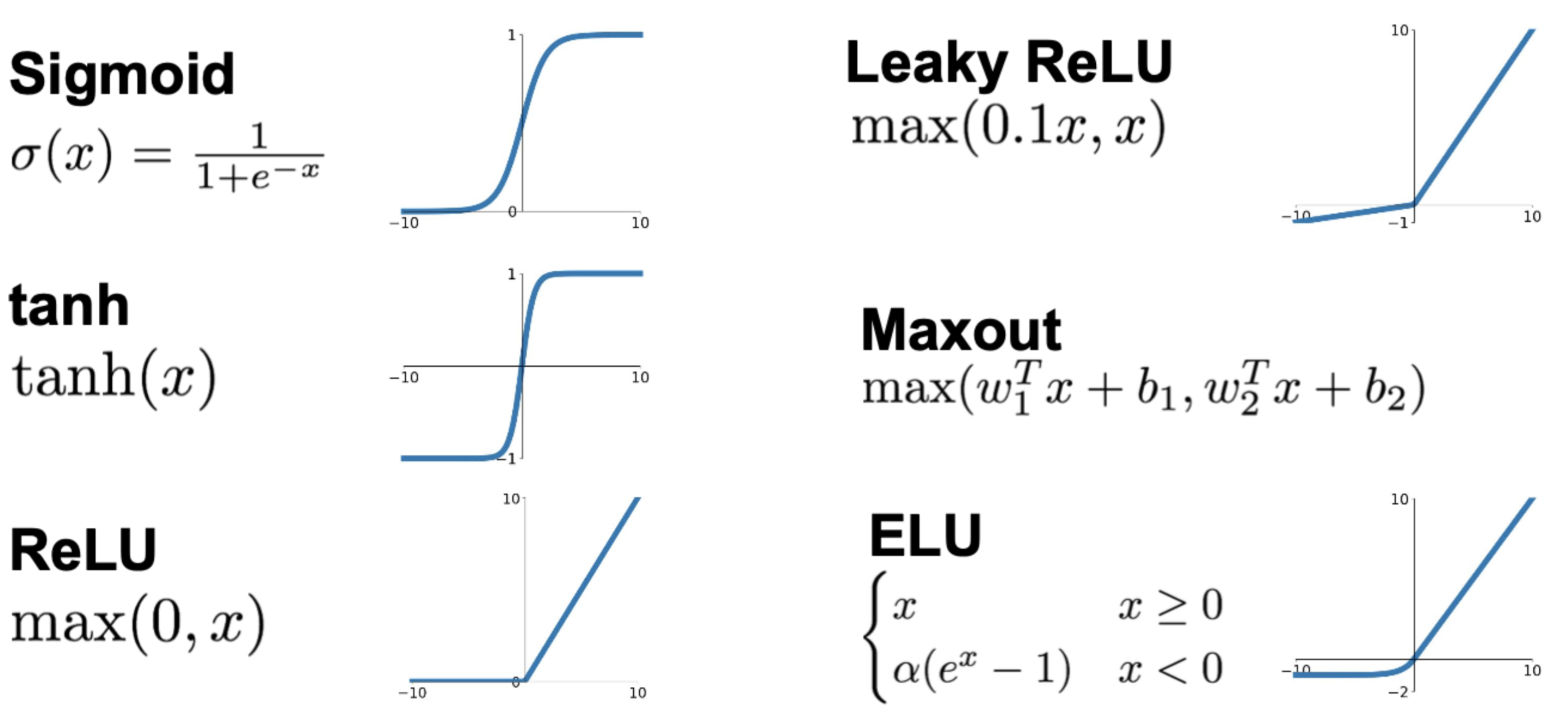
종류들 :
-
다른 뉴런에게 자극을 보낼지, 아닐지를 결정하는 게 Neural network에서의 Activation function과 같으며, 실제 뉴런과 가장 비슷한 기능을 수행하는 것은 바로 ReLU
-
Sigmoid
-
넓은 범위의 숫자를 [0,1]사이로 squash 해줌
-
요즘 거의 잘 사용되지 않음
-
문제점 :
-
Vanishing gradient
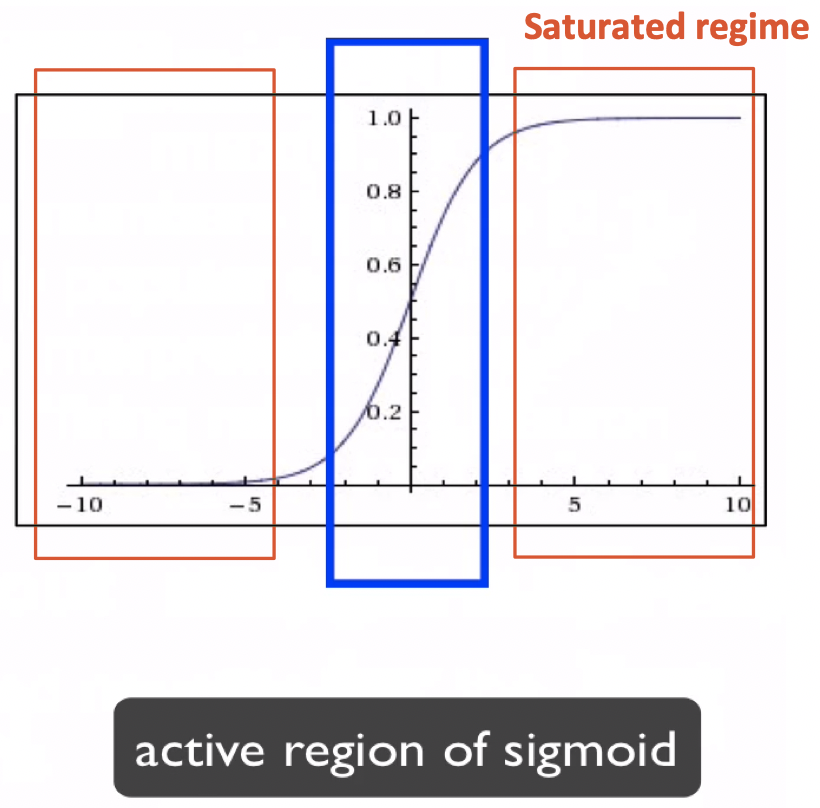
Active region of sigmoid : sigmoid가 실제로 Active하게 역활할 수 있는 부분
Saturated regime : local gradient가 0을 가져 backpropagation이 멈추게됨
-
Not zero-centered (모든 y값이 0 이상임)
zig zag 방식으로 이동하게되서 결과적으로 매우 느리게 수렴됨 – 최적의 weight를 찾는게 느림
-
Exp( ) 연산적으로 hight cost
-
-
-
Hyperbolic Tangent (tanh)
- 넓은 범위의 숫자를 [-1,1]사이로 squash 해줌
- Zero-centered (y값의 중간값이 0임)
- 문제점 :
- 여전히 Saturated regime 이 존재함
-
Rectified Linear Unit (ReLU)
- x가 positive인 지역 (그래프 제1사분면)에선 Saturated regime 가 존재하지

- 연산이 매우 효율적
- Sigmoid/tanh에 비해 6배 이상 빠르게 수렴 – 최적의 weight를 찾는게 비교적 빠름
- 문제점 :
- Not zero-centered
- x가 0보다 적은 지역은 gradient가 0이 되서 Vanishing gradient가 발생
- x가 positive인 지역 (그래프 제1사분면)에선 Saturated regime 가 존재하지
-
Leaky ReLU
-
ReLU와는 다르게 x가 0보다 적은 지역에도 gradient를 가질 수 있음
즉, backpropagation이 멈출일이 없음
-
-
Exponential Linear Units (ELU)
- ReLU 장점들을 다 가지고 있으면서 gradient가 죽지 않음
- Zero mean output에 가까운 형태를 가짐
- 문제점
- Exp( ) 연산적으로 hight cost
-
Maxout Neuron
- 입력 x를 받아드리는 특정한 기본 함수를 미리 정의하지 않음
- gradient가 0이 되지도 않고 backpropagation이 멈추지도 않음
- 문제점 :
- 뉴런 마다 두개의 parameter를 가지고 있기 때문에 연산이 두배로 증가
-
Data Preprocessing
-
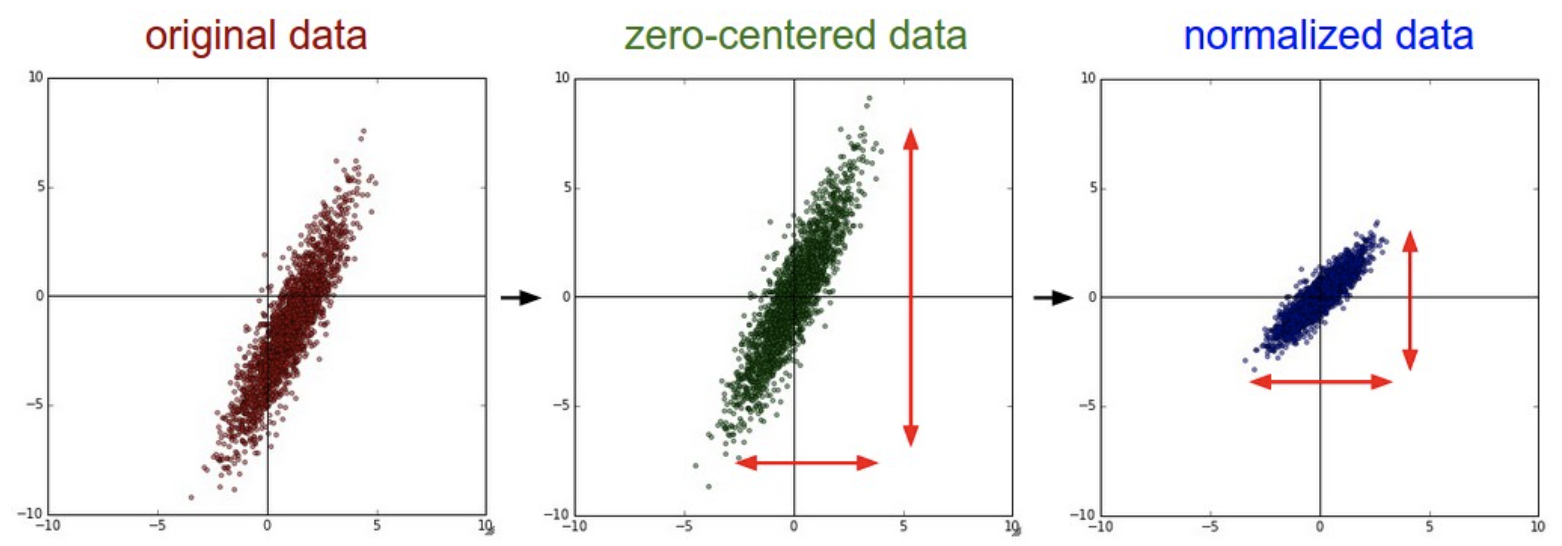
Zero-centered :
-
각 데이터에 평균을 빼줌
original_data = original_data - np.mean(original_data, axis = 0)⚠️ 参考 : 이 전처리 방법은 Sigmoid의 Not zero-centered 문제를 해결하기엔 충분하지 못함
- 처음에 input 이미지가 Zero-centered로 전처리되면 1번째 layer는 해결이 될 수 있겠지만 그 다음 layer부터 다시 문제가 반복됨
-
-
Normalized data : 특정 범위안에 데이터가 들어갈 수 있게 만들기
-
각 데이터에 표준편차를 나눠줌
original_data = original_data / np.std(original_data, axis = 0) -
이미지에서는 일반적으로 Zero-centered는 수행하지만 Normalization는 수행 안함
👉 이미지의 각 pixel는 이미 0~255 사이에 값을 가지고 있으니깐
-
Weight Initialization
방법0. 모든 initial weight를 0으로 설정
- 모든 Neuron들은 다 같은 연산을 수행함 – 결국, 모든 Neuron들이 모두 똑같이 생기게 된다
방법1. Small random numbers
-
표준정규분포에서 샘플링하는 방법을 사용한 다음 더 작을 값을 위해 스케일링 해줌 (0.01를 곱해줌)
W = 0.01* np.random.randn(fan_in, fan_out)-
fan_in: number of inputs -
fan_out: number of outputs
-
-
Network가 작은 경우에 문제 없음, 하지만 Network가 큰 경우 문제가 생김
- 모든 Activaton들이 0이 되버림
- Backward pass를 하게된다면 Vanishing gradient가 발생하게 됨
- 만약
W = 0.1* np.random.randn(fan_in, fan_out)일 경우- 거의 모든 Neuron들이 -1 또는 1로 Saturation 됨
- Gradient들도 모두 0이되서 weight 업데이트가 일어나지 않음
- 즉, 스케일링이 너무 작으면( × 0.01) 사라져버리고 너무 크면 ( × 0.1) Saturation 됨
방법2. Xavier Initialization
-
input의 개수가 많으면 weight값이 작아지고 input의 개수가 적으면 weight값이 커지는 방식으로 진행하는 방식
W = np.random.randn(fan_in, fan_out) / np.sqrt(fan_in) -
하지만 Linear activation이 있다는 가정하에 잘 작동함
- ReLU (Non-linear형) 를 쓰면 잘 작동하지 못함
- ReLU는 출력의 절반을 죽이고 그 절반은 매번 0이 되기 때문에 출력의 분산을 반토막 내버림
방법3. He at al., 2015
-
Activation function이 ReLU일 경우 최적인 weight 초기화 방법
W = np.random.randn(fan_in, fan_out) / np.sqrt(fan_in/2)- Neuron들 중 절반이 없어진다는 사실을 고려해서 2로 나눠줌
방법4. Batch Normalization
-
Batch :
-
각 layer들을 거치면서 입력값의 분포가 달라지는 현상이 발생하기 때문에 학습 불안정화가 생긴다고 주장

-
batch normalization은 학습 과정에서 각batch 단위 별로 데이터가 다양한 분포를 가지더라도 각 batch별로 평균과 분산을 이용해 정규화 시켜줌

-
Batch-Norm은 입력의 스케일만 살짝 조정해주는 역할이기 때문에 Fully-connected 와 Conv Layer 어디에든 적용할 수 있음

- Conv Layer의 경우, Activation map(채널, Depth)마다 평균과 분산을 하나만 구함. 그리고 현재 Batch에 있는 모든 데이터로 Normalize 해줌. (Conv Layer 출력인 activation maps이 ‘공간적 구조’를 유지하고 있기를 원하기 때문에 이 점을 고려해서 CNN Activation Map을 Normalize 할 때는 전체 map의 평균과 분산을 같이 구함)
- Batch 사이즈가 작으면 정확도가 떨어지긴 하겠지만 여전히 비슷한 효과를 줄 수 있음
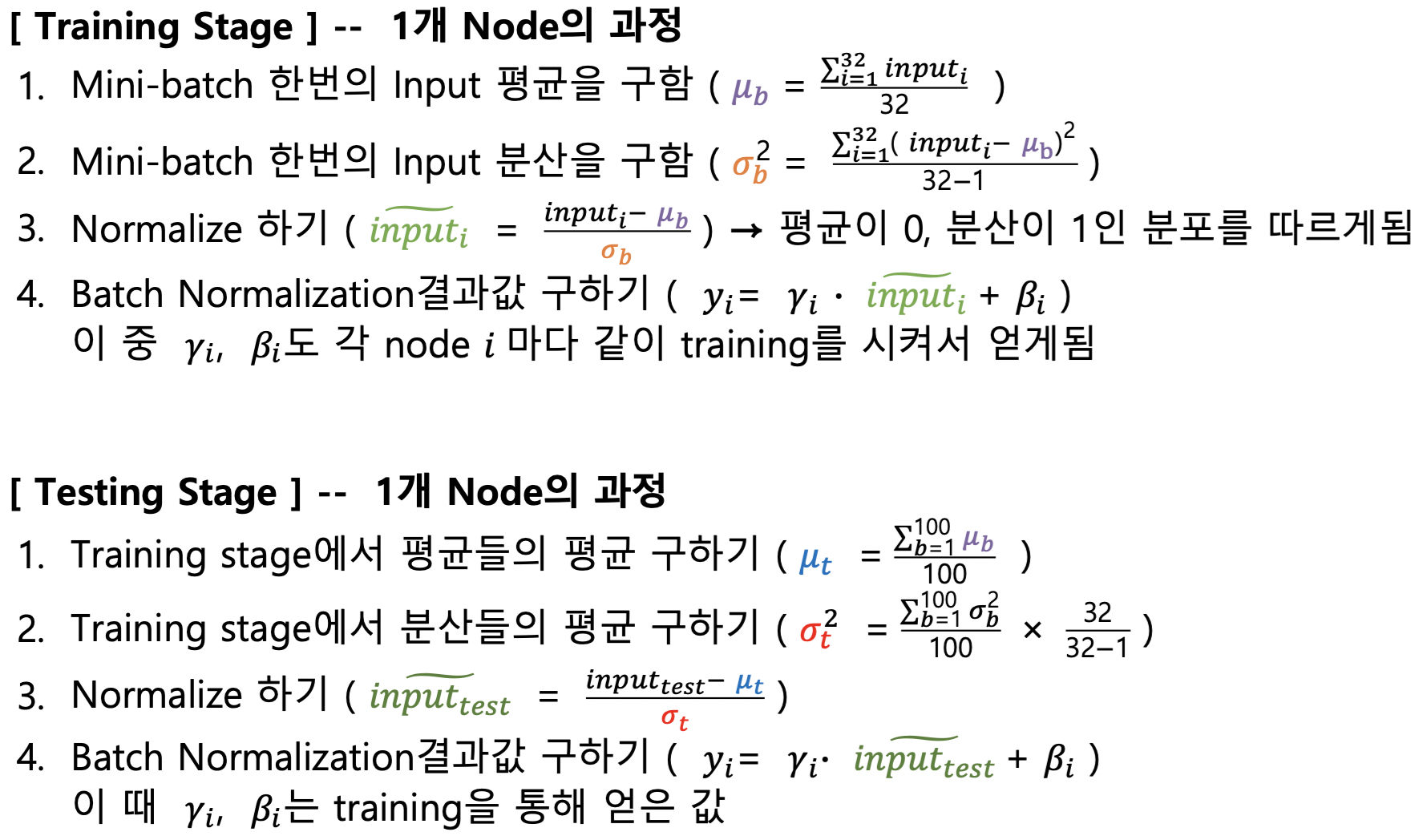
- 4번 단계에서 Unit gaussian으로 normalize 된 값들을 감마로는 스케일링 효과를 베타는 이동의 효과를 줄 수 있음
- 추가적인 유연성을 제공
-
장점 :
- Learning rate가 다소 큰 값을 가지더라도 그걸 허용해줌으로써 빠른 학습을 가능케 하는 효과가 있음
- weight 초기화에 너무 의존하지 않아도 됨
-
Batch Norm이 regularization의 역할도 함
-
각 Layer의 출력은 해당 데이터 하나뿐만 아니라 batch안에 존재하는 모든 데이터들에 영향을 받음 (평균, 분산)
(왜냐하면 각 레이어의 입력은 해당 배치의 (표본) 평균으로 Normalize 되기 때문)
-
-
Batch Normalization를 사용하면 Dropout을 사용할 필요가 없다고 함
Training (Transfer Learning)
-
우리 모델을 처음부터 학습시키는 경우는 잘 없다
-
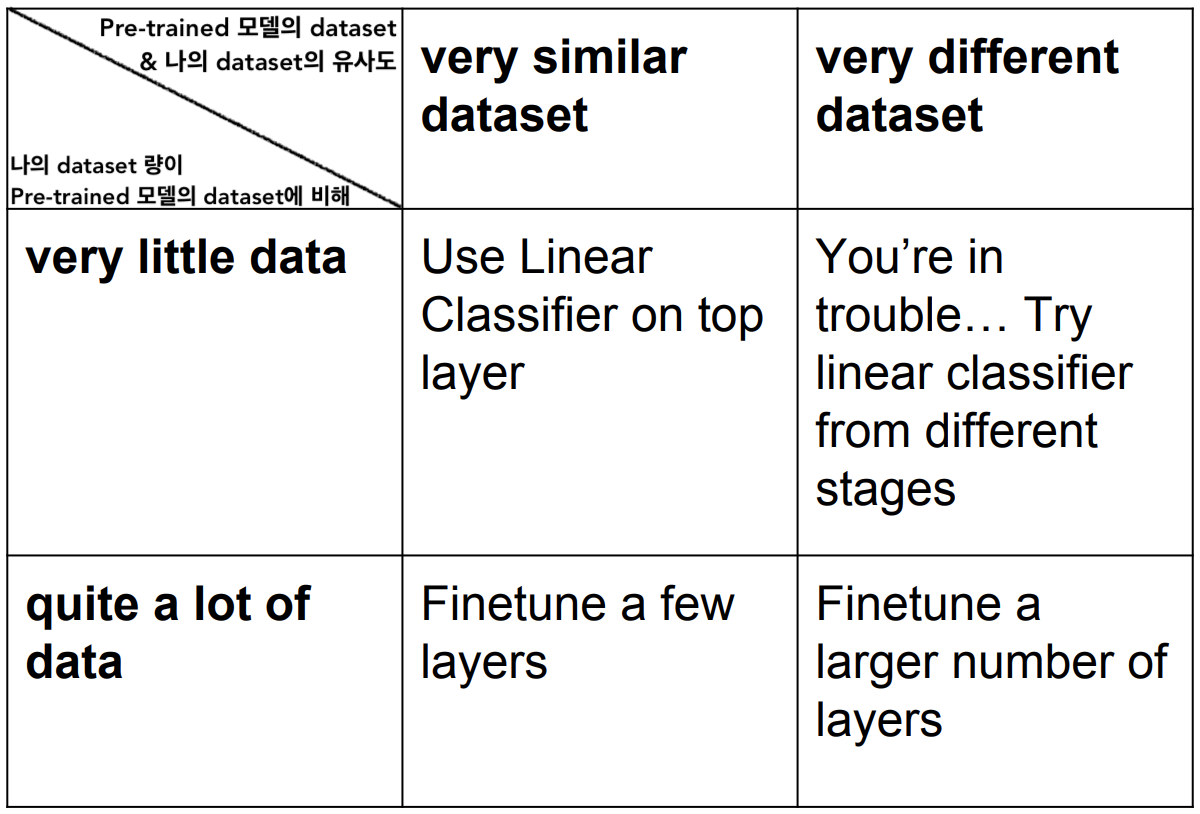
이미 연관된 다른 데이터셋으로 학습된 모델의 Weight들을 가져와서 이 가중치를 우리의 데이터에 적용시키는 방법 :
-
Small size dataset 일 경우 :
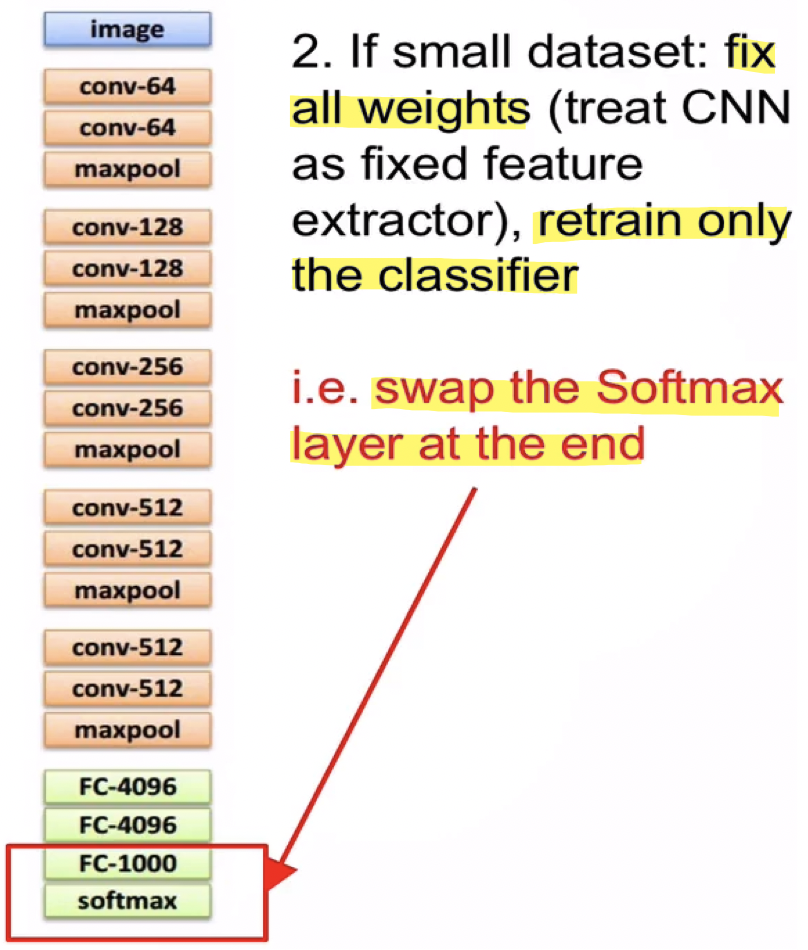
- 즉, fix한 부분은 feature를 추출해주는 역할로 사용하면됨
-
Medium size dataset 일 경우 :
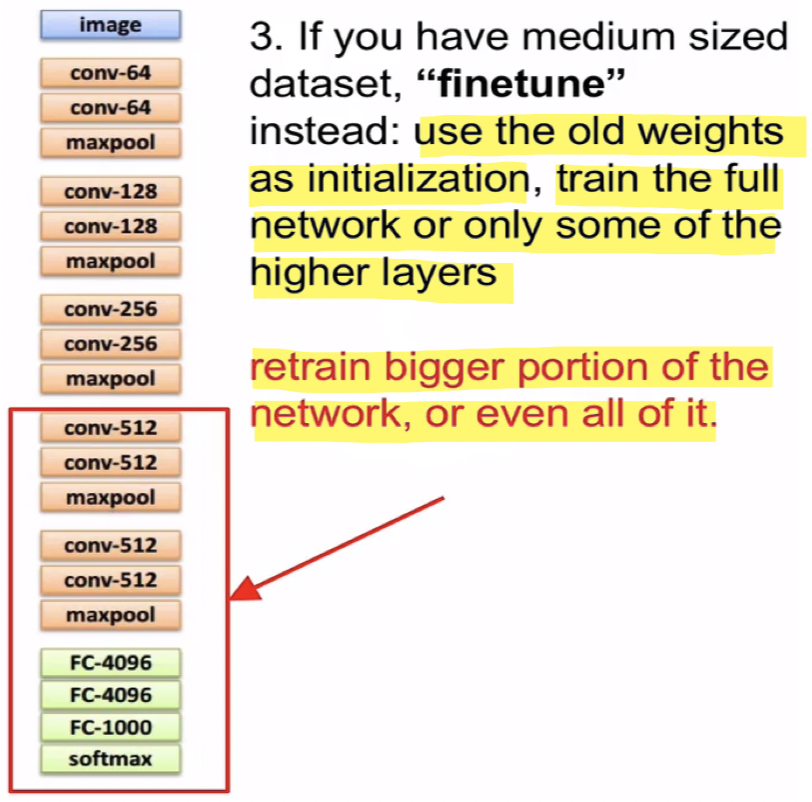
 Tip : top layer들의 경우 learning rate설정을 원래의 learning rate의 약 1/10을 사용하고 중간 layer들의 경우 learning rate설정을 원래의 learning rate의 약 1/100을 사용을 추천
Tip : top layer들의 경우 learning rate설정을 원래의 learning rate의 약 1/10을 사용하고 중간 layer들의 경우 learning rate설정을 원래의 learning rate의 약 1/100을 사용을 추천
-
-
이런 pre-trained 모델을 활용하여 학습하는 방식이 처음부터 학습을 시키는 방식보다 성능이 잘나오는 이유 :
-
pre-trained 모델이 ImageNet 데이터셋으로 훈련된 것이라 하면..
- ImageNet 데이터셋과 유사한 이미지들을 classify 해야될 경우, top layer들만 학습시켜도 좋은 성과를 얻을 수 있음
- ImageNet 데이터셋과 관련없는 데이터셋 (ex. 의료 데이터) 을 classify 해야될 경우, 학습 시켜야되는 layer를 top layer들 부터 중간 layer들 까지 올려야됨
🤔 그럼 중간 layer들 에 전혀관계 없는 이미지 (ex. 의료 데이터)에 대해서 학습을 시켰다고 해서 어떻게 의료 데이터에 대한 classify 성능이 더 좋아지냐?
-
가장 앞단의 filter에서는 Low level의 feature들(edge, color 등)을 인식하고 뒷쪽으로 갈 수록 앞쪽 layer의 filter들과 합성되어서 점점 abstract한 것들을 인식함.
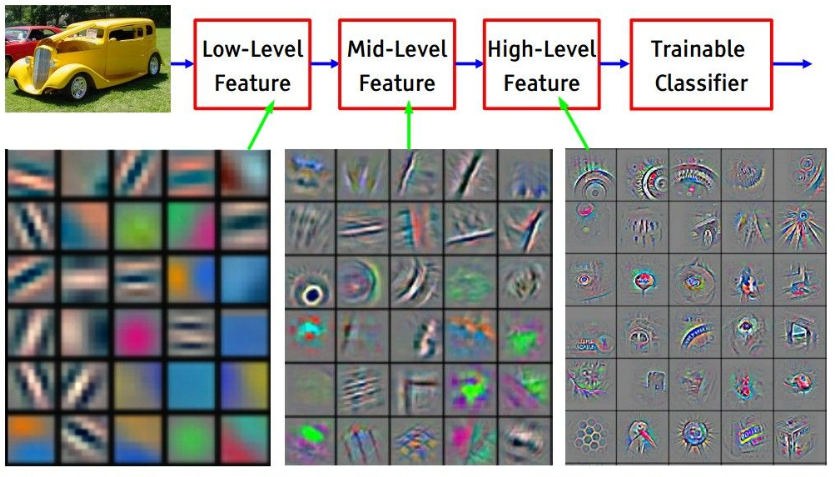
그래서 Low level의 feature를 미리 학습해 놓는다는 거는 그 어떤 이미지를 분석 할 때도 도움이 됨
-
-
정리를 해보면 :
Babysitting the Learning Process
-
Learning 과정을 어떻게 관리하고 시작해 나가야되는지?
- 전처리
- 이미지에 대해선 Zero-centered 수행
- Neural Network Architecture 결정
- Hidden Layer는 몇개를 둘 것인지? 각각의 Layer에는 몇개의 Node를 둘 것 인지?
-
Loss값 체크 (Sanity Check)
-
일부 training set을 활용하여 모델을 훈련시켜 Overfitting 일어나는 확인
-
Overfitting : 최종적으로 Loss 값이 거의 0에 가깝게 매우 작고 training set과 validation set에 대한 accuracy는 1일 경우
-
모델이 Overfitting이 일어났다면, 즉
💁🏻 Backpropergation이 동작을 잘하고 있는 걸 알 수 있음
💁🏻 Weight 업데이트도 제대로 동작하고 있는 걸 알 수 있음
💁🏻 Learning rate도 크게 문제가 없다는 걸 알 수 있음
-
-
Learning rate 찾아가는 단계
-
전체 training set을 활용하여 모델을 훈련시킴
-
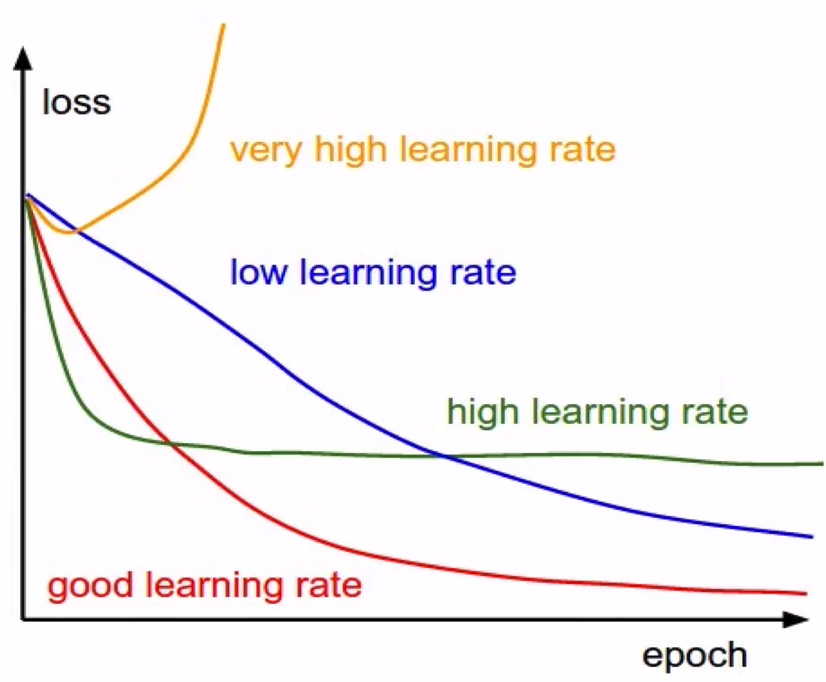
Learning rate를 매우 작은 숫자로 설정할 경우 (ex.
lr = 1e-6)👉 현상 : 보통 Loss값은 잘 변하지 않음, 그럼에도 불구하고 training set과 validation set에 대한 accuracy는 증가하는 모습을 보임
-
Learning rate를 매우 큰 숫자로 설정할 경우 (ex.
lr = 1e6)👉 현상 : Loss값이 NaN을 가짐, 또는 마지막에 Inf를 가짐
-
-
cross validation을 통해서 정확한 Learning rate을 결정한다
-
- 전처리
Hyperparameter Optimization
-
Cross-validation :
- training set으로 학습시키고 validation set으로 평가하는 방법
- 전략 – Coarse하게 시작하고 Fine하게 튜닝해 나가자
- Coarse : Epoch 수를 작은 숫자를 줘서 대략적인 Hyperparameter 설정값에 대해 감을 잡음
- Fine : Epoch 수를 좀 더 크게 줘서 세부적인 Hyperparameter seaching을 함
-
Learning rate는 gradient와 곱해지기 때문에 선택범위를 log scale을 사용하는 편이 좋다.
-
Random search
 Grid search
Grid search-
Grid search : Hyperparameter를 고정된 값과 간격으로 샘플링하는 것
-
Random search :
-
처음에 대략적 범위를 설정
lr = 10**random.uniform(-3, 6),reg = 10**random.uniform(-5, 5) 👉
10**을 해줌으로써 log space화를 해줌 -
결과에 근거하여 범위를 줄여 나감
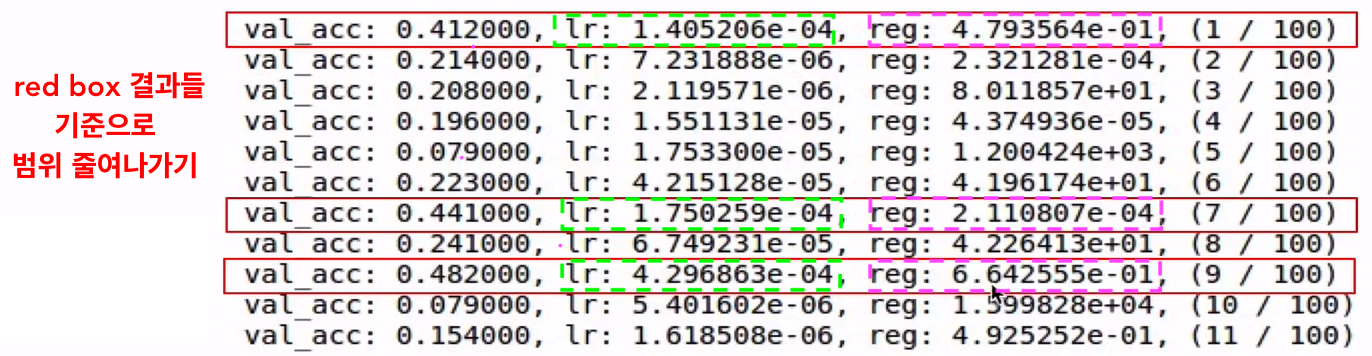
👉
lr = 10**random.uniform(-3, -4),reg = 10**random.uniform(-4, 0)로 변경
-
-
Grid search 보다는 Random search를 하는 것이 더 Good
-
-
Loss curve 모니터링
-
Accuracy curve 모니터링
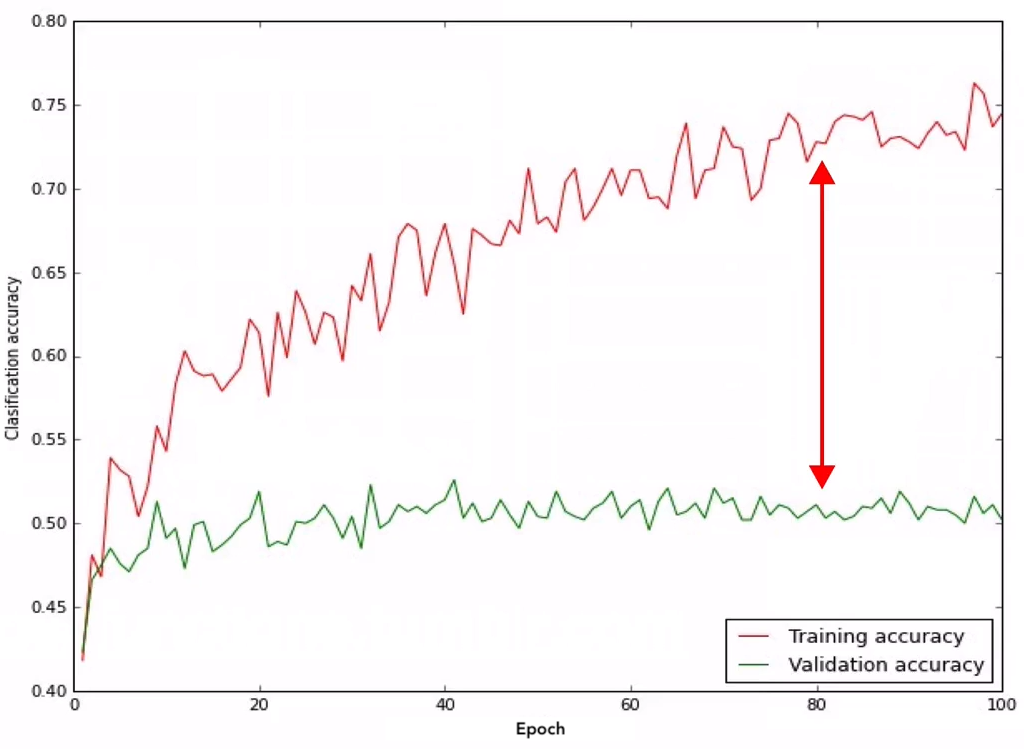
- 수치의 해석이 가능해서 선호함
- Traning accuracy와 Validation accuracy에는 Gap이 생김
- 만약 Gap이 너무 크다면 Overfitting 의심해봐야됨 👉 regularization를 강화하기
- 만약 Gap이 너무 작다면 아직 Overfit하지 않은 것이고 capacity을 높힐 수 있는 충분한 여유가 있다는 것을 의미함
Parameter update
-
Stochastic Gradient Descent(SGD)는 weight를 찾아가는 과정 매우 느림
""" lr : Learning rate dx : Gradient """ while True: dataBatch = dataset.sample_dataBatch() loss = network.forward(dataBatch) dx = network.backward() x = x + (-lr*dx) # Gradient descent update
-
1st Order Optimization Method : Loss Function를 구하는데 있어서 gradient 정보만 사용
-
Momentum
# Momentum update velocity = mu*velocity - lr*dx x = x + velocity-
mu: 마찰 계수(점차 속도가 느려지게 진행되도록 해줌) 보통 0.5, 0.6, 또는 0.99로 설정 - 속도
velocity를 일단 업데이트 해주고,x의 위치를 속도를 통해서 업데이트 해줌- 언덕에서 공을 굴리는 상황을 연상하면됨

- 경사가 낮은 지점에서는 속도가 천천히 build up 됨
- 언덕에서 공을 굴리는 상황을 연상하면됨
- SGD보다 빠르게 찾아감
-
-
Nesterov Accelerated Gradient (NAG)
-
Momentum보다 항상 convergence rate가 더 좋다
-
Momentum step :
mu*velocity -
Gradient step :
lr*dx -
Gradient step을 계산하기 전에 Momentum step을 미리 고려를 해서 시작점을 Momentum step의 종료점으로 변경한 다음 gradient step을 평가하는 방식
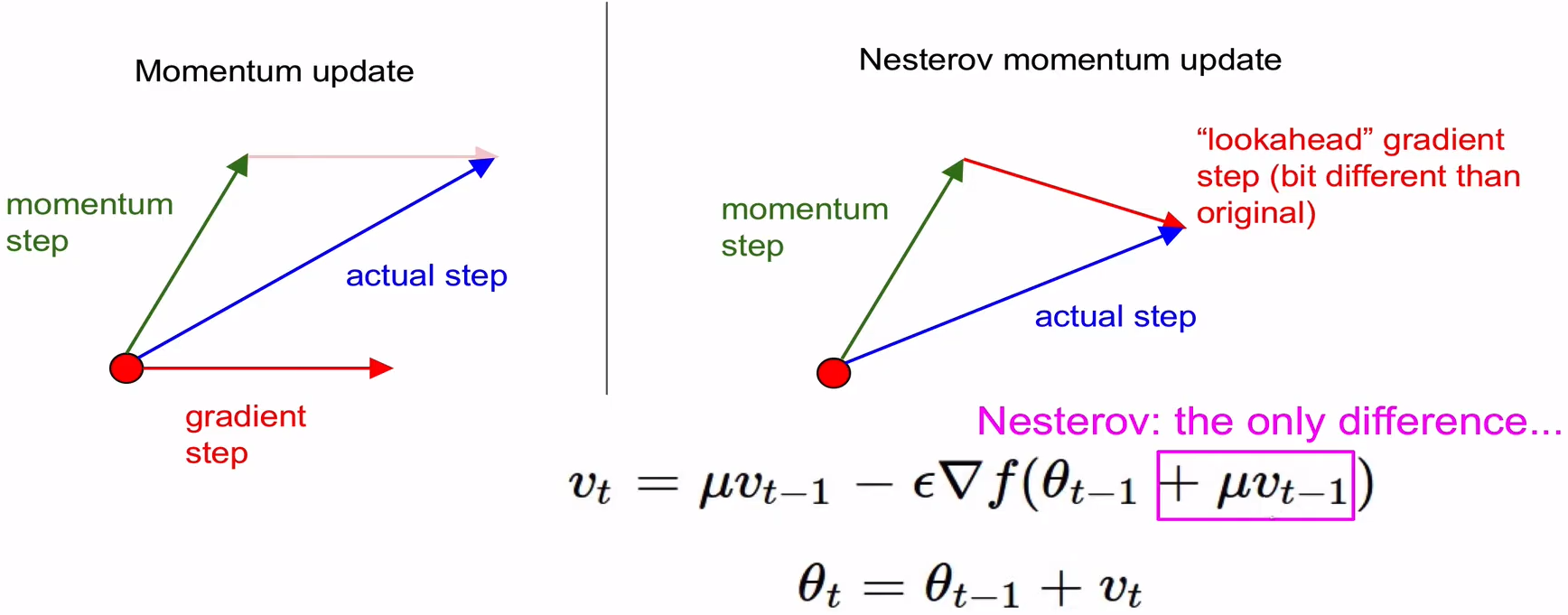
-
forward/backward 과정에서 불편한 점 :
Momentum : parameter vector θ 와 그 위치에서의 gradient를 구하게됨
NAG : parameter vector θ 와 parameter vector와 다른 위치에서의 gradient를 요구함
💁🏻 해결방안 :
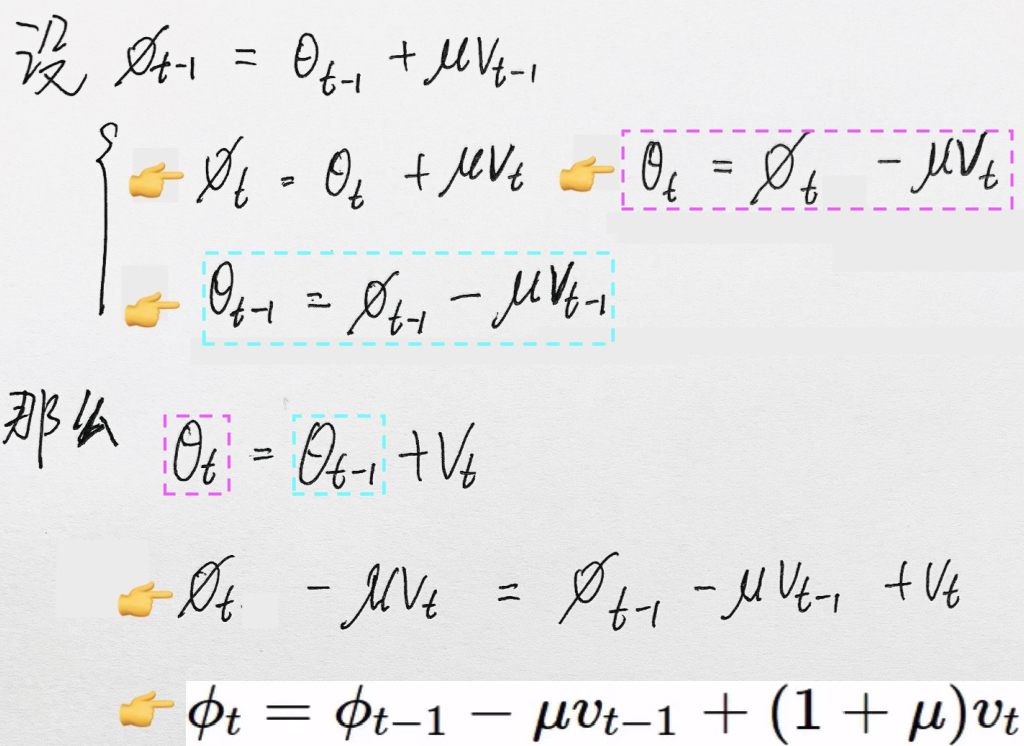
# Nestrov Momentum update velocity_prev = velocity velocity = mu*velocity - lr*dx x = x + -mu*velocity_prev + (1+mu)*velocity
-
-
AdaGrad
# AdaGrad update cache = cache + dx**2 x = x + (-lr*dx / (np.sqrt(cache)+1e-7))- cache : 계속 증가하게되는 양수, parameter vector와 동일한 size의 거대한 vector
- Per-parameter adaptive learning rate method : 모든 parameter들이 동일한 learning rate를 적용받는게 아니라, cache가 계속 building up 되면서 하나 하나의 parameter들이 다 다른 값의 learning rate와 같은 영향을 받게됨
-
1e-7: 0으로 나누는 일을 방지하기 위한 역할 - 문제점 : cache가 계속 building up 되면서 결국 step size가 0에 가까워져서 조기에 학습이 종료되는 상황이 발생하게 됨
-
RMSProp
- AdaGrad 업데이트 중 학습이 종료되지 않게 하기 위해 어떤 “에너지”를 제공
# RMSProp cache = decay_rate*cache + (1-decay_rate)*dx**2 x = x + (-lr*dx / (np.sqrt(cache)+1e-7))-
decay_rate: step의 속도를 가속/감속 시킬 수 있다
-
Adam – Good default choice 👍
# Adam m,v = #... initialize caches to zeros for t in xrange(1, big_number): m = beta1*m + (1-beta1)*dx # Momentum-like v = beta2*v + (1-beta2)*(dx**2) # RMSProp-like mb = m/(1-beta1**t) # bias correction vb = v/(1-beta2**t) # bias correction x = x + (-lr*mb / (np.sqrt(vb)+1e-7)) # RMSProp-like-
Momentum + RMSProp 결합한 형태
-
beta1,beta2: hyperparameter로써 보통 0.9, 0.99 으로 설정 -
bias correction : 초기 iteration 단계에서
m,v를 scaling up 해주는 역할
-
-
-
위의 방안들이 모두 learing rate
lr를 hyperparameter로 가지는데 어떠한 learing rate를 가지는게 최선일까?-
초기에는 큰 learing rate를 적용하고 서서히 learing rate를 작게 만들어 적용할 수 있게하도록
- 方法1 – Step Decay : 한 Epoch마다 learing rate를 일정한 간격으로 감소시켜주는 방법
- 方法2 – Exponential Decay :
- 方法3 – 1/t Decay :

-
-
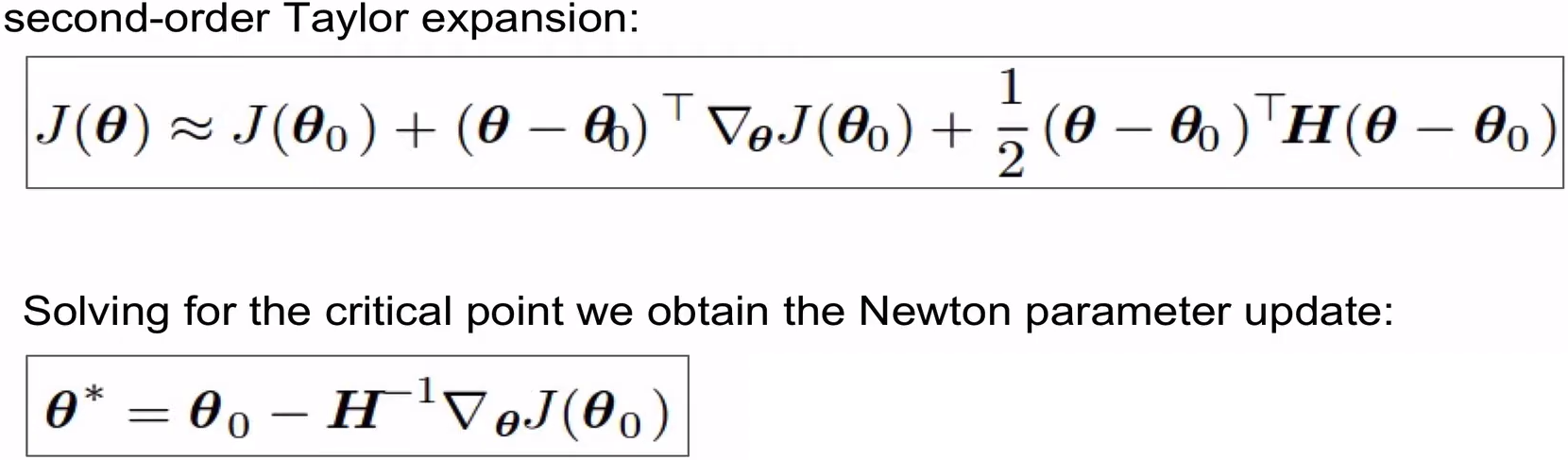
2nd Order Optimization Method : Hessian을 통해서 경사뿐만 아니라 곡면이 어떻게 구성되었는지 알 수 있음
- 곡면이 어떻게 구성되었는지 알면 학습 필요없이 바로 최저점으로 갈 수 있음
-
장점 :
- learing rate가 필요 없게됨
- 수렴이 빨라진다
-
Deep 한 Neural Network에서는 연산량이 너무 많아 현실적으로 사용불가 :
- 만약에 parameter를 1억개를 가지는 Neural Network일 경우, Hessian는 1억×1억의 matrix를 가지게 됨
- 게다가 이 matrix를 inverse 해야됨
-
2nd Order Optimization Method를 사용하기 위한 접근법들
-
BGFS
장점 : Hessian matrix를 inverse하는 대신에 rank 1의 Hessian을 inverse함으로써 연산을 줄임
단점 : 여전히 메모리에 저장, 큰 Network에선 아직 동작하기 어려움
-
Limited memory BGFS
장점 : 메모리에 저장하지
단점 : 일반적으로 full-batch일 땐 잘 동작, Mini-batch 환경에선 잘 동작
-
Regularization
-
Dropout
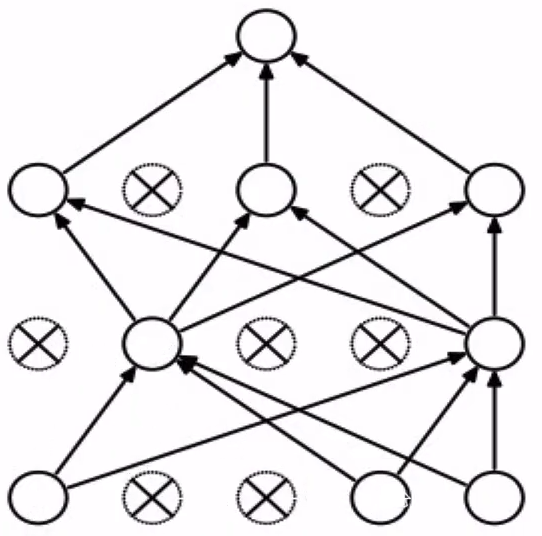
probability = 0.5 # dropout확률 설정 def train_step(X): # X는 data Hidden1 = np.maximum(0, np.dot(Weight1, X)+bias1) # Activation Func : ReLU Mask1 = np.random.rand(*Hidden1.shape) < probability Hidden1 = Hidden1 * Mask1 # 0으로 설정된 node는 drop됨! Hidden2 = np.maximum(0, np.dot(Weight2, Hidden1)+bias2) # Activation Func : ReLU Mask2 = np.random.rand(*Hidden2.shape) < probability Hidden2 = Hidden2 * Mask2 # 0으로 설정된 node는 drop됨! out = np.dot(Weight3, Hidden2)+bias3 # backward pass : compute gradient... # perform parameter update...-
Forward pass 과정에서 일부 뉴런을 0으로 만드는 것 (Forward pass iteration 마다 모양은 계속 바뀜)
-
Mask: 각 node가 0 아니면 1이 되도록 설정해주는 역할 (probability보다 작으면 0 아님 1이 됨)-
numpy.random.rand()메소드를 사용하여(x1, ... ,xn)모양의 n차원 랜덤 배열을 생성 -
*Hidden.shape: tuple unpacking Code Example
-
-
랜덤하게 일부 node들을 0으로 설정 = 연결이 끊킨거나 다름없음
-
근데 Drop을 하는게 왜 좋음?
👉 Network 내의 각 node가 한 부분만 집중적으로 관찰하는게 아니라 약간씩 중복을 가지면서 모든 것을 같이 관찰하는 모습을 보이면서 성능이 좋아짐
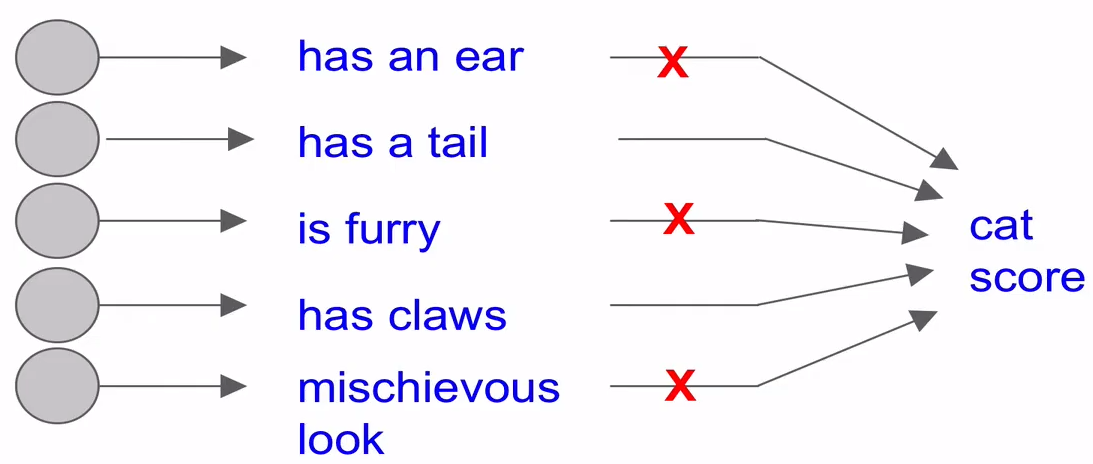
👉 Overfitting을 어느정도 막아준다.
👉 단일 모델로 앙상블(여러 개의 모델 에서 나온 값을 평균하는거) 효과를 가질 수 있다
여러 개의 모델 = Forward pass iteration 마다 모양이 계속 바뀜
-
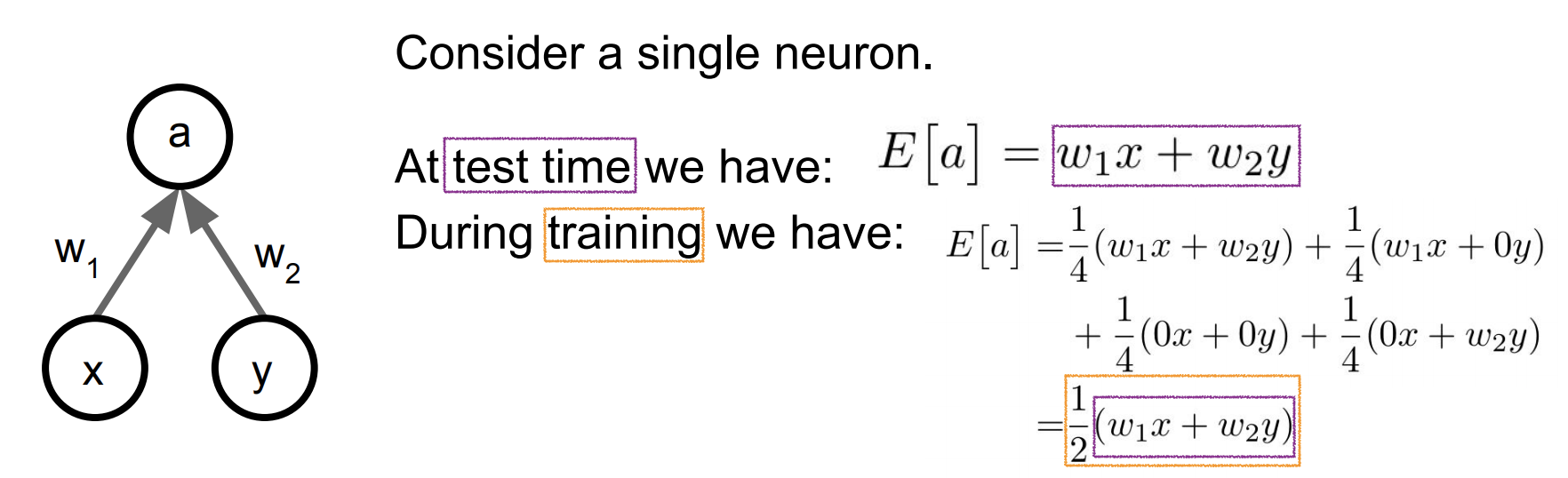
Testing stage :
💁🏻 Monte Carlo approximation 방법 : Testing stage에도 Dropout를 그대로 활용, 그래서 각각의 Dropout에 대해서 평균을 낸 예측방법 , 비효율적인 방법
💁🏻 Dropout을 사용하지 않는 방법 :
Testing stage 때는 모든 neuron들은 turn on!
대신 activation 값들을 training stage 때의
probability만큼 scaling을 해줘야됨def predict(X): Hidden1 = np.maximum(0, np.dot(Weight1, X)+bias1) * probability Hidden2 = np.maximum(0, np.dot(Weight2, Hidden1)+bias2) * probability out = np.dot(Weight3, Hidden2)+bias3이유 : Training stage / Testing stage 때 의 예측값이 서로 상이하다.
Example.
probability가 0.5 (== 1/2)일 경우
💁🏻 Inverted Dropout 방법 :
- Scaling을 Testing stage 에 안하고 Training stage 에 처리해줌
probability = 0.5 def train_step(X): Hidden1 = np.maximum(0, np.dot(Weight1, X)+bias1) / probability # Scaling Mask1 = np.random.rand(*Hidden1.shape) < probability Hidden1 = Hidden1 * Mask1 Hidden2 = np.maximum(0, np.dot(Weight2, Hidden1)+bias2) / probability # Scaling Mask2 = np.random.rand(*Hidden2.shape) < probability Hidden2 = Hidden2 * Mask2 out = np.dot(Weight3, Hidden2)+bias3 # backward pass : compute gradient... # perform parameter update... def predict(X): Hidden1 = np.maximum(0, np.dot(Weight1, X)+bias1) # No Scaling Hidden2 = np.maximum(0, np.dot(Weight2, Hidden1)+bias2) # No Scaling out = np.dot(Weight3, Hidden2)+bias3 -
참고 : 최근에 Batch Normalization쓰는 경우 Dropout를 잘 사용하지
-
《Reference》